Code Release - EMVS: Event-based Multi-View Stereo
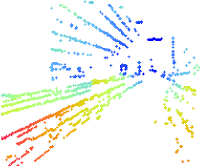
We release the code for Event-based Multi-View Stereo (EMVS): 3D reconstruction with an event camera. The code provided is implemented in C++ and produces accurate, semi-dense depth maps without requiring any explicit data association or intensity estimation. The code runs in real-time on a CPU.