Our paper on Agile Quadrotor Flight through Narrow Gaps available on Arxiv
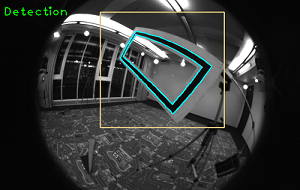
Our recent work "Aggressive Quadrotor Flight through Narrow Gaps witn Onboard Sensing and Computing", under review for ICRA 2017, is available on Arxiv for download. [Link (PDF, 4 MB)]