Robotics and Perception Group News
News list
-
Our paper EVO (Event-based, 6-DOF Parallel Tracking and Mapping in Real-Time) was accepted to RA-L!
Our recent work on parallel tracking and mapping with an event camera, in real-time on a CPU, was accepted to RA-L!
-
Our research on aggressive flight through narrow gaps with active monocular vision is on MIT Technology Review
Our recent work on quadrotor flight through narrow gaps using only onboard sensing and computing is featured on MIT Technology Review. Click here to read the article.
-
Code Release - EMVS: Event-based Multi-View Stereo
Our paper Deep Drone Racing: Learning Agile Flight in Dynamic Environments won the Best Systems Paper Award at the Conference on Robotic Learning (CoRL) 2018.
-
CoRL 2018 Best System Paper Award
Our paper Deep Drone Racing: Learning Agile Flight in Dynamic Environments won the Best Systems Paper Award at the Conference on Robotic Learning (CoRL) 2018.
-
RPG won the IROS 2018 Autonomous Drone Race
We are proud to announce that our team won the IROS Autonomous Drone Race Competition, passing all 8 gates in just 30 seconds! In order to succeed, we combined deep networks, local VIO, Kalman filtering, and optimal control. Watch our performance here
-

Oculus Quest is out
Mark Zuckerberg just announced the new Oculus VR headset, called Oculus Quest. This is that our former lab startup, Zurich Eye, now Oculus Zurich has been working on for the past two years. Watch the video.
-

RPG live demo at Langen Nacht der Zurcher Museen
We performed a live quadrotor demo at the Zurich Kunsthalle during the Langen Nacht der Zurcher Museen, as part of the 100 Ways of Thinking show, in front of more than 200 people. Check out the media coverage here.
-
-
Huge media coverage for search and rescue demonstration
Our lab received great Swiss media attention (NZZ, SwissInfo, SRF) for our live flight demonstration of a quadrotor entering a collapsed building to simulate a search and rescue operation. Check out the video here.
-
RPG research featured on NewScientist
Our research on autonomous drone racing was featured on NewScientist. Check out the article here.
-
Paper accepted in RA-L 2018
Our paper about safe quadrotor navigation computing forward reachable sets was accepted for publication in the Robotics and Automation Letters (RA-L) 2018. Check out the PDF.
-
Paper accepted at RSS 2018
Our paper about drone racing was accepted to RSS 2018 in Pittsburgh! Check out the long version, short version and the video!
-
Paper accepted in IEEE TRO!
Our paper on Continuous-Time Visual-Inertial Odometry for Event Cameras has been accepted for publication at IEEE Transactions of Robotics. Check out the paper.
-
-

RPG receives 2017 IEEE Transactions on Robotics (TRO) best paper award
Our paper on IMU pre-integration received the 2017 IEEE Transactions on Robotics (TRO) best paper award at ICRA 2018 in Brisbane, Australia. Check out the paper here!
-
IEEE TRO Best Paper Award
We are proud to announce that our paper on IMU pre-integration will receive the 2017 IEEE Transactions on Robotics (TRO) best paper award. On this occasion, IEEE made the article open access for the next ten years!
C. Forster, L. Carlone, F. Dellaert, D. Scaramuzza
On-Manifold Preintegration for Real-Time Visual-Inertial Odometry
IEEE Transactions on Robotics, vol 33, no. 1, pp. 1-21, Feb. 2017.
PDF DOI YouTube -

Qualcomm Innovation Fellowship
Henri Rebecq, a PhD student in our lab, won a Qualcomm Innovation Fellowship with his proposal "Learning Representations for Low-Latency Perception with Frame and Event-based Cameras"!
-
Release of NetVLAD in Python/Tensorflow
We are happy to announce a Python/Tensorflow port of the FULL NetVLAD network, approved by the original authors and available here (see also our software/datasets page). The repository contains code which allows plug-and-play python deployment of the best off-the-shelf model made available by the authors. We have thoroughly tested that the ported model produces a similar output to the original Matlab implementation, as well as excellent place recognition performance on KITTI 00.
-
Release of Data-Efficient Decentralized Visual SLAM
We provide the code accompanying our recent Decentralized Visual SLAM paper. The code contains a C++/Matlab simulation containing all building blocks for a state-of-the-art decentralized visual SLAM system. Check out the paper, the Video Pitch, the presentation and the code.
-
Release of the RPG Quadrotor Control Framework
We provide a complete framework for flying quadrotors based on control algorithms developed by the Robotics and Perception Group. We also provide an interface to the RotorS Gazebo plugins to use our algorithms in simulation. Check out our software page for more details.
-
Release of the Fast Event-based Corner Detector
We provide the code of our FAST event-based corner detector. Our implementation is capable of processing millions of events per second on a single core (less than a micro-second per event) and reduces the event rate by a factor of 10 to 20. Check out our Paper, video, and code.
-
-
Henri Rebecq finalist at the Qualcomm Innovation Award Fellowship
Henri Rebecq, PhD student in our lab, was finalist at the Qualcomm Innovation Award Fellowship.
-

Christian Forster finalist in the Georges Giralt PhD Award!
Christian Forster, first PhD student to graduate from RPG, ranked second in the 2017's edition of the George Giralt European PhD Thesis Award out of 41 applications.
-
Huge media coverage for DroNet
Our recent work on how to teach a drone to fly autonomously and safely in the streets of a city (PDF) received a huge media coverage. Check out our media page.
-
RPG publishes event camera SLAM patent
Check out our Publications. Link from the PATENTSCOPE database.
-
RPG Impresses Swiss Government Representatives
RPG impresses Swiss minister Schneider-Ammann and other federal and cantonal representatives at the inauguration of the Innovation Park Switzerland. Check out here.
-
-
-
RPG in the NCCR integrative demo of aerial and terrestrial robots
Our group took part to the NCCR Robotics integrative demo of aerial and terrestrial robots for rescue missions. Check out the video here.
-
-
RPG celebrates 5-year anniversary!
In this clip, we summarize our main achievements, projects, awards, exhibitions, and upcoming videos! Watch our YouTube video!
-
RPG research on DVS featured on IEEE Spectrum
Our latest work on quadrotor flight with event cameras was featured on IEEE Spectrum. For more details, check our research page.
-
Paper accepted in IJCV !
Our work on 3D reconstruction with an event camera in real-time has been accepted for publication in the International Journal of Computer Vision. Read the paper here.
-
Paper accepted in T-PAMI !
Our work on 6-DOF ego-motion estimation with an event camera has been accepted for publication in IEEE Trans. Patter Analysis and Machine Intelligence. Check out the paper here.
-
Davide Scaramuzza gives invited talk at GeorgiaTech Robotics Seminar Series
Davide Scaramuzza talks about autonomous, agile, vision-controlled drones and event cameras at the GeorgiaTech robotics seminar series: check out the video here.
-
RPG nominated Best Paper Award on Safety Security and Rescue Robotics Finalist at IROS 2017
Our paper "Rapid Exploration with Multi-Rotors: A Frontier Selection Method for High Speed Flight" was nominated finalist for the Best Paper Award on Safety Security and Rescue Robotics at IROS 2017 in Vancouver. Check out the paper here.
-
Davide Scaramuzza talks about Swiss vision startups in the Swiss ICT journal
Check out the article here.
-
Press release: RPG drones use event cameras to fly faster and even in the dark!
This is the first ever autonomous flight with an event camera, which demonstrates agile maneuvers and flying in low-light environments. Possible applications could include supporting rescue teams with search missions at dusk or dawn. Check out the press release, our video and our paper.
-
RPG organizes IROS'17 workshop on fast, vision-controlled MAVs
Giuseppe Loianno (UPenn), Davide Scaramuzza (RPG), and Vijay Kumar (UPenn) will organize the third international workshop on Vision-based High Speed Autonomous Navigation of UAVs
-
RPG affiliated with the Institute of Neuroinformatics
We are happy to announce that our lab is now affiliated with the Institute of Neuroinformatics (INI), a joint institute belonging to the University of Zurich and ETH Zurich.
-
Davide Scaramuzza appointed Tenured Associate Professor
Davide Scaramuzza was appointed Tenured Associate Professor with double affiliation with the Insitute of Neuroinformatics of the University of Zurich and ETH Zurich. Check out the news here.
-
-
RSS'17 Best Student Paper Award Finalist
Our paper Fast Trajectory Optimization for Agile Quadrotor Maneuvers with a Cable-Suspended Payload, accepted for oral presentation at RSS'17, was nominated finalist for the Best Student Paper Award! Check out the paper here and the video here.
-
Slides and Videos of the ICRA'17 Workshop on Event-based Vision are out!
The slides and videos of the talks of the International Workshop on Event-based Vision are now available at the workshop website and the RPG Workshops Youtube channel.
-
Code for Event Lifetime released
We are happy to announce the release of the code for event lifetime. The lifetime of an event is the time that it takes for the moving brightness gradient causing the event to travel a distance of 1 pixel. More details in the following ICRA publication. The code can be found here.
-
Davide Scaramuzza talks at Maker Festival of his home town!
Prof. Davide Scaramuzza gave a talk at the Maker Festival in Terni about the role of computer vision in autonomous cars and drones. Check the news here (Italian).
-
RPG wins the 2017 Misha Mahowald Prize for Neuromorphic Engineering
The Robotics and Perception Group wins the 2017 Misha Mahowald Prize, which recognizes outstanding achievement in the field of neuromorphic engineering. Check out the press release here.
-
Our paper on Volumetric Information Gain Metrics for Active 3D Reconstruction has been published by Autonomous Robots!
Our recent work comparing volumetric information gain metrics for object reconstruction is part of the Autonomous Robots special issue on Active Vision.
Check out the paper here.
-
One of our PhD students won the ETH Medal!
Antonio Loquercio, PhD student in our lab, won the ETH Medal for his outstanding Master thesis! Congratulations!
-
New PhD student and Postdoc
We welcome Dr. Suseong Kim as new Postdoc, and Philipp Foehn as new PhD student, in our lab!
-
Fotokite won EUrobotics transfer award
Fotokite, the Swiss startup developing tethered drones, which was incubated within RPG in 2014 through the NCCR Spin Fund, won the 2017 EUrobotics Tech Transfer Award! Congratulations! We are very proud of you!
-
Davide Scaramuzza's CMU seminar on IEEE Spectrum
Davide Scaramuzza's seminar on visual-inertial state estimation, active vision, and event-based vision at CMU was featured on IEEE Spectrum. Watch the video on YouTube.
-

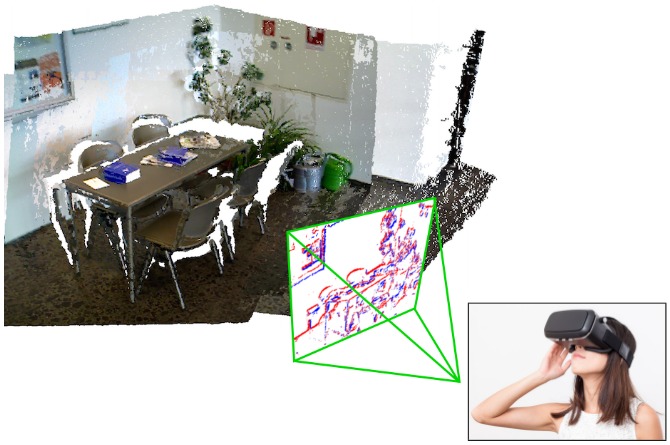
Magic Leap buys Dacuda's 3D Division
Dacuda's 3D Division, a long-standing collaborator of RPG, got acquired by Magic Leap, the unicorn of Augmented Reality (news here). One amazing result of our collaboration was a software that runs on a smartphone and delivers at the same time an immersive virtual-reality experience like high-end VR headsets. This software was the result of a great project with RPG, which was demoed at CES 2017 (LINK). Congratulations guys!.
-
RPG organizes ICRA'17 Workshop on Event-based Vision
Davide Scaramuzza, Andrea Censi (MIT), and Guillermo Gallego (RPG-UZH) are organizing the second International Workshop on Event-based Vision.
-
RPG featured on the University of Zurich Journal
Our research about autonomous drones was featured on the University of Zurich Journal as 3rd on the list of the most popular news release of 2016. Check out the journal here.
-
-

Our paper on efficient decentralized visual place recognition was accepted to RA-L!
Our recent work on decentralized visual place recognition using a distributed inverted index was accepted to RA-L!
Check out the paper here.
-
Our paper on Accurate Angular Velocity Estimation with an Event Camera was accepted to RA-L!
Our recent work on motion estimation with an event camera by contrast maximization was accepted to RA-L!
-
Our paper on Agile Quadrotor Flight through Narrow Gaps available on Arxiv
Our recent work "Aggressive Quadrotor Flight through Narrow Gaps witn Onboard Sensing and Computing", under review for ICRA 2017, is available on Arxiv for download. [Link]
-
RPG featured in the World Robotics report of the International Federation of Robotics
Our lab was featured in the 2016 World Robotics report of the International Federation of Robotics as outstanding profile of research lab in service robotics.
-
Open PhD and Postdoc positions in Deep Learning, Control, and Robot Vision
We have several open PhD student and Postdoc positions in Deep Learning, Control, and Robot Vision for Agile, Vision-based Quadrotor Flight. For more info and applications, please see here.
-

Facebook-Oculus VR Zurich (aka Zurich-Eye) is in the main Swiss news!
Zurich-Eye, the Wyss-Zurich project co-founded in Sep. 2015 by former RPG members Christian Forster (author of SVO), Matia Pizzoli (author of REMODE), and Manuel Werlberger, gets featured in the Swiss news.
-
Event-Camera Dataset and Simulator released!
We are happy to announce the release of the first public datasets recorded with an event camera (DAVIS) for pose estimation, visual odometry, and SLAM applications! The data also include intensity images, inertial measurements, ground truth from a motion-capture system, synthetic data, as well as an event camera simulator! We believe that event cameras will allow future robots to move faster and more agilely. Find out more on the dataset website!
-
Fritz-Kutter Award for Industry Related Thesis in Computer Science
Our former student and current Research Assistant Timo Horstschäfer won the Fritz Kutter Award for Industry Related Thesis in Computer Science with his Master Thesis "Parallel Tracking, Depth Estimation, and Image Reconstruction with an Event Camera". This is the second time in two years that an RPG master student wins this prestigious award! Congratulations!
-
IROS'16 workshop organized by Davide Scaramuzza attracts 200 people worldwide!
>Our third international workshop on VVision-based High Speed Autonomous Navigation of UAVs, co-organized by Giuseppe Loianno (UPenn), Davide Scaramuzza (RPG), and Vijay Kumar (UPenn) featured an impressive line of reknown speakers, live demos, industries, and attracted more than 200 people worldwide!
-
Zurich-Eye now part of Facebook-Oculus VR Zurich!
Zurich-Eye, the Wyss-Zurich project co-founded in Sep. 2015 by former RPG members Christian Forster (author of SVO), Matia Pizzoli (author of REMODE), and Manuel Werlberger, is now part of Oculus VR Zurich. RPG is very proud of them! This highlights the importance and impact of the great work they have done!
-
New paper accepted at BMVC16!
Our paper "EMVS: Event-based Multi-View Stereo" about monocular 3D reconstruction using an event camera has been accepted for oral presentation at BMVC'16! Check out our publication list.
-
RPG organizes IROS'16 workshop on fast, vision-controlled MAVs
Giuseppe Loianno (UPenn), Davide Scaramuzza (RPG), and Vijay Kumar (UPenn) will organize the third international workshop on VVision-based High Speed Autonomous Navigation of UAVs
-
New drone engineer!
Welcome to Alessandro Simovic as a new drone engineer in our lab!
-
New visiting Assistant Professor
Welcome to Stefano Ghidoni from the University of Padua as a visiting assistant professor in our lab!
-
Trained in 60 seconds...
RPG and IDSIA have collaborated on a new paper, which will be presented at ISER 2016. We show that we can train a terrain classifier for search and rescue scenarios while our quadrotor is in flight, in only one minute! Results can be seen in this YouTube video, and details can be found in our publication list.
-
Check out our SLAM position paper!
Cesar Cadena, Luca Carlone Henry Carrillo, Yasir Latif, Davide Scaramuzza, Jose Neira, Ian Reid, and John Leonard have co-authored a paper on Simultaneous Localization And Mapping: Present, Future, and the Robust-Perception Age. Check it out!
-
RPG members win reading group competition at ICVSS
Zichao Zhang and Titus Cieslewski were in the reading group that won the reading group competition at the International Computer Vision Summer School. One of the main ingredients for this success was an experimental literature visualization tool developed at the RPG group retreat.
-
Open position as Drone Research Engineer
We have an open position in our team for a Drone Research Engineer. Check out our open positions.
-
-
Software Release: Information Gain Based Active Reconstruction Framework
The software package corresponding to the paper An Information Gain Formulation for Active Volumetric 3D Reconstruction is now available from our Github page. This is a general, open-source, framework for volumetric reconstruction that is object, sensor, and robot-agnostic. Some results can be see in this YouTube video.
-
New visiting researcher from Toyota Research Institute Boston
Welcome to Dr. Naveen Kuppuswamy, our new visiting researcher from Toyota Research Institute Boston (MA)!
-

Qualcomm Innovation Fellowship
Elias Mueggler, a PhD student in our lab, won a Qualcomm Innovation Fellowship with his proposal "Event-based Vision for High-Speed Robotics"!
-
-
RPG receives huge media coverage worldwide!
We received huge media coverage for our research on autonomous drone navigation in the forests using Deep Neural Network; among these, Discovery Channel Canada and NBC News.
-
RPG on IEEE Spectrum and Robohub
Our recent work on autonomous navigation in the forests using Deep Neural Networks makes it to IEEE Spectrum and Robohub.
-
RPG on SRF Tagesschau
Our recent work on autonomous navigation in the forests using Deep Neural Networks makes it to the Swiss National TV News channel: SRF Tagesschau.
-
Our drones use DNNs to learn to recognize and follow forest trails in search for missing people
This research appeared in the IEEE Robotics and Automation Letter, will be presented at the IEEE International Conference on Robotics and Automation (ICRA'16) and is nominated for the best AAAI video Award. Journal paper. More info. YouTube video.
-

Davide Scaramuzza Associate Faculty of the Wyss Zurich
Davide Scaramuzza was appointed Associate Faculty at Wyss Zurich, the new translational center of UZH and ETH Zurich dedicated to regenerative and robotics technologies.
-

One of our students receives a prize from Homegate at HackZurich!
Titus Cieslewski, a PhD student in our lab, has received a prize from Homegate during the HackZurich hackathon, for the project Wonsch. He and his team were among the top 3 of the 20 teams that participated in the Homegate challenge during the hackathon.
-
-
Davide Scaramuzza from Magic to Robotics!
NCCR Robotics interviews Davide Scaramuzza about how his academic path, from working as a magician in theatres and public squares to pay his undergraduate studies to becoming a robotics professor (LINK).
-
RPG at the Swiss Robotics Industry day
NCCR Robotics organized the Swiss Robotics Industry day at EPFL Lausanne. We showed the collaboration of a flying robot with a legged robot from ETH Zurich. Some highlights are shown in a video by Le Matin.
-
Interview with Davide Scaramuzza on Robohub
An interview with Davide Scaramuzza was published on Robots Podcast and Robohub. Check out our media page!
-
IROS'15 workshop organized by Davide Scaramuzza attracts 200 people worldwide!
Our second international workshop on Vision-based Control and Navigation of Small, Lightweight UAVs, co-organized by Giuseppe Loianno (UPenn), Davide Scaramuzza (RPG), and Vijay Kumar (UPenn) featured an impressive line of reknown speakers, live demos, industries, and attracted more than 200 people worldwide!
-
Davide Scaramuzza gives tutorial on event-based vision at IROS'15 workshop
Davide Scaramuzza gives a tutorial on event-based vision at the IROS'15 workshop on Alternative Sensing for Robot Perception: Beyond Laser and Vision. The slides can be downloaded from here.
-
New Research Assistant
Welcome to Michael Gassner as a new research assistant in our lab!
-
RPG at Scientifica 2015
The Robotics and Perception Group showed their research at Scientifica, the sciene fair of ETH and University of Zurich. 25.000 visitors attended the event. Have a look at the gallery!
-
RPG organizes IROS'15 workshop on visual navigation of MAVs
Giuseppe Loianno (UPenn), Davide Scaramuzza (RPG), and Vijay Kumar (UPenn) will organize the second international workshop on Vision-based Control and Navigation of Small, Lightweight UAVs at IROS'15.
-
RPG members create spinoff Zurich-Eye
Christian Forster (author of SVO), Matia Pizzoli (author of REMODE), and Manuel Werlberger create Zurich-Eye, an spinoff project of Wyss-Zurich dedicated to the commercialization of visual-inertial navigation solutions.
-
RSS'15 Best Paper Award Finalist
Christian Forster's RSS'15 paper is Best Paper Award Finalist at RSS'15!
-
-
-
ICRA'15 workshop on Innovative Sensing for Robotics
Andrea Censi (MIT) and Davide Scaramuzza organized a workshop on Innovative Sensing for Robotics at ICRA'15!
-
RPG research featured on IEEE Spectrum
Our latest work on failure recovery from agressive flight IEEE Spectrum. For more details, see the ICRA'15 paper and the accompanying video.
-
-
-
-
RPG celebrates 3-year anniversary!
In this clip, we summarize our main achievements, projects, awards, exhibitions, and upcoming videos! Watch our YouTube video!
-

Davide Scaramuzza wins ERC Starting Grant (1.5 million EUR)
Davide Scaramuzza wins ERC Starting Grant, through the Swiss National Science Foundation.
-
Best Paper Award Finalists
Our SSRR'14 paper on "Aerial-guided Navigation of a Ground Robot among Movable Obstacles" was selected as Finalist for the Best Paper Award. Our ICRA'14 paper "REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time" was nominated as Finalist for the NCCR Best PostDoc Paper Award.
-
RPG Master student wins Fritz Kutter Award!
Our former Master student Basil Huber won the 2014 Fritz Kutter Award for Industry Related Thesis in Computer Science. His thesis was on High-Speed Pose Estimation using a Dynamic Vision Sensor. Congratulations!
-
RPG research featured on IEEE Spectrum
Our latest work on event-based vision was featured on IEEE Spectrum. For more details, see the IROS'14 paper and the accompanying video.
-
New Postdoc and visiting students
We welcome Dr. Manuel Werlberger as new Postdoc in our lab! We are also happy to host Junije Zhang and Zichao Zhang as visiting PhD students.
-
-

Attend our live quadrotor demo at ECCV workshop on Sep. 6
We will demonstrate autonomous, vision-based flight and live dense 3D mapping with a quadrotor MAV at the ECCV workshop on Computer Vision in Vehicle Technology on Sep. 6 at 5:30pm. Watch here the video preview.
-
New Postdocs and visiting students
We welcome Dr. Guillermo Gallego and Dr. Jeff Delmerico as new Postdocs in our lab! We are also happy to host Antonio Toma, Gabriele Costante, Nathaly Gasparin, Ra'Eesah Mangera, Kumar Shaurya Shankar and Xin Yu as visiting students this year.
-
-
Davide Scaramuzza wins IEEE Robotics and Automation Early Career Award!
Davide Scaramuzza wins the 2014 IEEE Robotics and Automation Society Early Career Award "for his major contributions to robot vision and visually-guided micro aerial vehicles".
-

RPG wins KUKA Innovation Award!
The Robotics and Perception Group wins the KUKA Innovation Award (20.000 EUR) with its demonstration of collaboration of flying and ground robots for search-and-rescue missions. Watch a video of the demo at AUTOMATICA.
-
Software Release: SVO - Semi-Direct Visual Odometry
The software corresponding to the paper SVO: Fast Semi-direct Monocular Visual Odometry can now be downloaded from our Github page. The source code is released under a GPLv3 licence. A professional edition license for closed-source projects is also available.
-
RPG appears among the European robotics success stories
RPG appears among the best 12 European robotics success stories advertised by EU commission. Read the full article.
-

RPG research featured on MIT News
Our latest work on event-based vision was featured in the MIT News. For more details, see the ICRA'14 paper.
-
-
-
-

Amazon Prime Air visits RPG
Daniel Buchmüller, co-founder and software engineer at Amazon Prime Air, visited us.
-
RPG featured on SRF 10vor10
The Robotics and Perception Group was featured in the news programme 10vor10 of the Swiss National TV (SRF). Check the video!
-
KUKA Best Student Project Award 2013!
Benjamin Keiser won the KUKA Best Student Project Award 2013 with his Master thesis Torque Control of a KUKA youBot Arm that he did with the Robotics and Perception Group. A demonstration of the capabilities of his controller is shown in this video.
-

Henri Seydoux, CEO of Parrot, visits RPG
Henri Seydoux, CEO and founder of Parrot, the company making the popular toy quadrocopter AR.Drone, visited us.
-
Open position in Embedded Computer Vision
Open position at the Robotics and Perception Group. Check here.
-
RPG organizes IROS'13 Workshop on MAVs
We are organizing the first international workshop on Vision-based Closed-Loop Control and Navigation of Micro Helicopters in GPS-denied Environments, featuring amazing live flight demonstrations!
-
RPG presents four papers at IROS'13
We will be presenting papers in sessions Localization II (Nov. 4) and Unmanned Aerial Vehicles IV (Nov. 5).
-
-
-
-
-
Join RPG at ICRA'13
RPG will give two talks at ICRA'13: one by Christian Forster (ThDInt.14) and one by Davide Scaramuzza (link)
-
A Documentary about RPG in the Swiss TV
A documentary by the Swiss TV about our autonomus helicopters for search and rescue(link to original article)
-
RPG participates at the Swiss Robotics Festival
The Swiss Robotics Festival is the largest Swiss Robotics exhibition, which this year attracted more than 20,000 participants. What some impressions from our demonstrations! (link)
-
-
RPG featured in the IEEE Spectrum News and Gizmodo
Our Easter video featuring a ground and an aerial robot got featured in IEEE Spectrum News and Gizmodo, the famous technology review webblogs. Read the articles: IEEE Spectrum and Gizmodo
-
RPG featured in the Weltwoche magazine
Weltwoche, a Swiss weekly magazine, talks about drones in the daily life. Read the article: "Der Spion von deinem Fenster" (German only).
-
Three new visiting PhD Students
Welcome to Chiara Troiani from INRIA, Volker Grabe from Max Planck Institute, and Damiano Verda from University of Genoa, who will join us for six months.
-
Two new PhD Students
Welcome to Matthias Faessler and Elias Mueggler as new PhD students in our lab!
-
Student Projects available for Spring 2013
UZH and ETH Students are welcome to apply for a project at our lab.
-
Four new members
We welcome Dr. Matia Pizzoli and Dr. Andras Majdik, our two new postdocs, and to Yanhua Jiang and Volker Grabe, our new visiting PhD students!
-
New visiting PostDoc
Welcome to Dr. Andrea Censi, our new visiting postdoc for three months!
-
Davide Scaramuzza at TEDxZurich
Prof. Davide Scaramuzza has been invited to give a talk at TEDxZurich on October 25, 2012.
-
RSS Workshop
Join the talk about Christian Forster's work on Collaborative Visual SLAM with Multiple MAVs at the RSS workshop on integration of perception with control and navigation for resource-limited, highly dynamic, autonomous systems.
-
Davide Scaramuzza wins European Young Researcher Award 2012
Congratulations! Download the press release.
-
-
sFly on IEEE News
The European project sFly, coordinated by Davide Scaramuzza, gets a log of media attention and gets featured on IEEE News. Read it here
-

Best BMVC'16 Industry Paper Award
Our paper EMVS: Event-based Multi-View Stereo, receives BMVC'16 Best Industry Paper Award! Congratulations to Henri Rebecq and Guillermo Gallego!
-
IROS 2016 Best Application Award Finalist
Our paper Low-Latency Visual Odometry using Event-based Feature Tracks was nominated as Finalist for the Best Application Paper Award at IROS 2016. Also, it was selected as highlight oral talk, with an acceptance rate of 0.4%. Congratulations to Beat Kueng, Elias Mueggler and Guillermo Gallego!
-
Agile Flight through Narrow Gaps
Check our our latest work on agile quadrotor flight through narrow gaps with onboard sensing and computing: LINK
-
New Visiting PhD Student
We welcome Rubén Gómez Ojeda from University of Málaga as new visiting PhD student in our lab!
-
RPG research featured on IEEE Spectrum and Robohub
Our latest work on quadrotor flight through narrow gaps was featured on IEEE Spectrum and Robohub. For more details, check our research page.