Navigation auf uzh.ch
Navigation auf uzh.ch
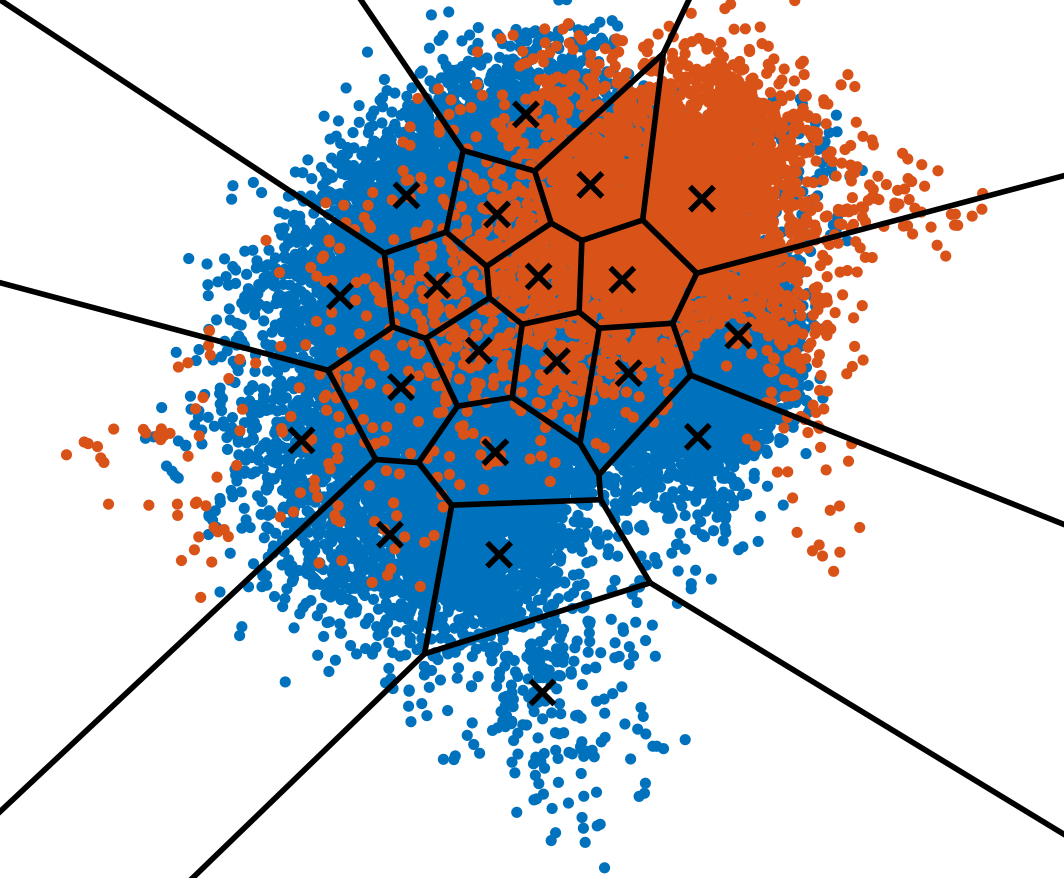
Our recent work on decentralized visual place recognition from full-image descriptors was accepted to MRS 2017, the first international symposium on multi-robot and multi-agent systems!
Check out the paper here (PDF, 3 MB).