Zichao Zhang

Biography
I am currently a PhD student at Robotics and Perception Group at University of Zurich, supervised by Prof. Dr. Davide Scaramuzza. I received my Bachelor degree in Detection, Guidance and Control from Beihang University (Beijing, China) in 2011 and Master degree in Computer Science from University of Zurich (Zurich, Switzerland) in 2016. From August to October 2019, I had the opportunity to work with Prof. Dr. Torsten Sattler at Chalmers University of Technology, exploring learning-based view synthesis for robust visual localization. My research interests include vision-based navigation, sensor fusion, robot state estimation and active vision.
Publications
|
|
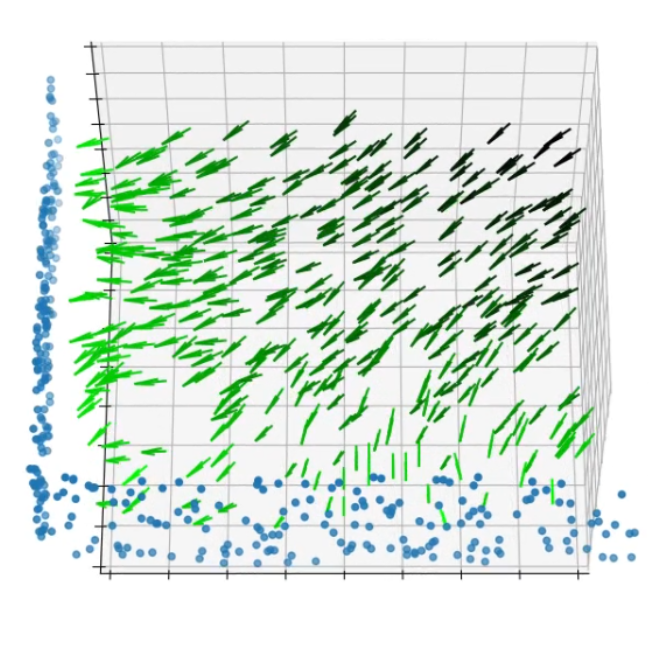
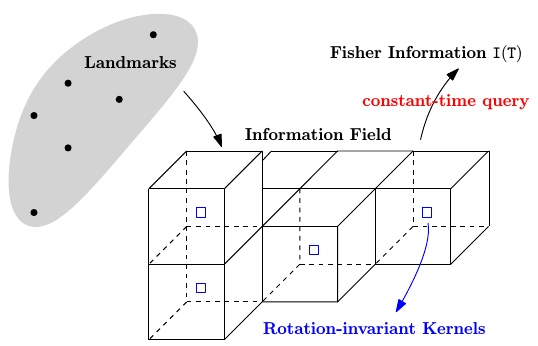
Z. Zhang, D. Scaramuzza Fisher Information Field: an Efficient and Differentiable Map for Perception-aware Planning arXiv, August 2020. |
|
|
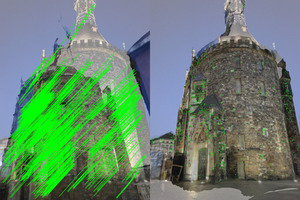
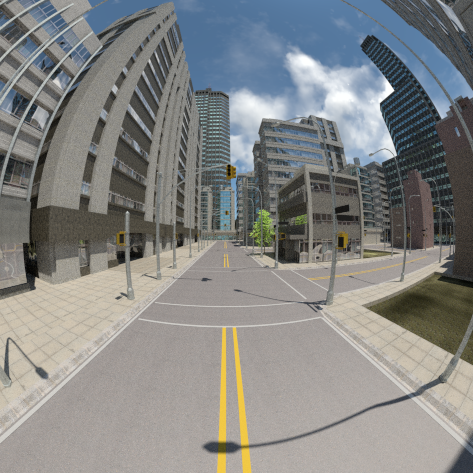
Z.Zhang, T. Sattler, D. Scaramuzza Reference Pose Generation for Visual Localization via Learned Features and View Synthesis arXiv, May 2020. |
|
|
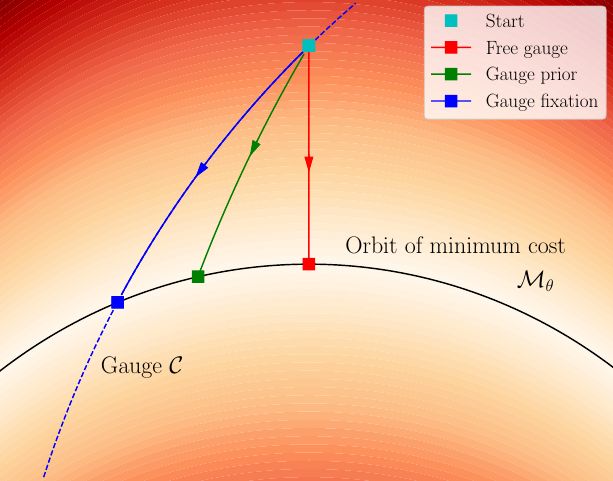
Z. Zhang, G. Gallego, D, Scaramuzza On the Comparison of Gauge Freedom Handling in Optimization-based Visual-Inertial State Estimation IEEE Robotics and Automation Letters (RA-L), 2018. |
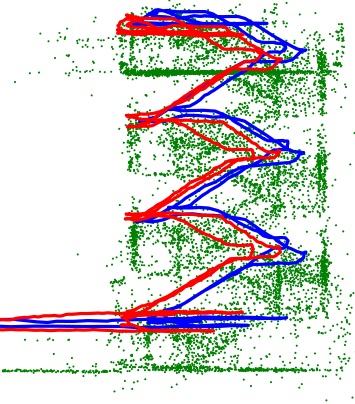 |
SVO: Semi-Direct Visual Odometry for Monocular and Multi-Camera Systems IEEE Transactions on Robotics, Vol. 33, Issue 2, pages 249-265, Apr. 2017. |
|
|
Visual-Inertial Odometry of Aerial Robots D. Scaramuzza, Z. Zhang Encyclopedia of Robotics, Springer, 2020. |

|
|
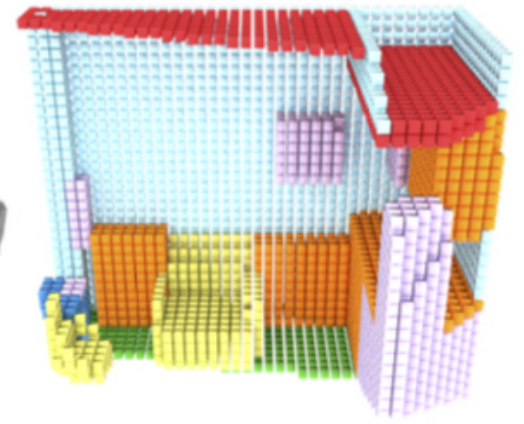
M. Muglikar, Z. Zhang, D. Scaramuzza Voxel Map for Visual SLAM IEEE International Conference on Robotics and Automation (ICRA), 2020. |
|
|
J. Kuo, M. Muglikar, Z. Zhang, D. Scaramuzza Redesigning SLAM for Arbitrary Multi-camera Systems IEEE International Conference on Robotics and Automation (ICRA), 2020. |
|
|
Z. Zhang, D. Scaramuzza Beyond Point Clouds: Fisher Information Field for Active Visual Localization IEEE International Conference on Robotics and Automation (ICRA), 2019. |
|
|
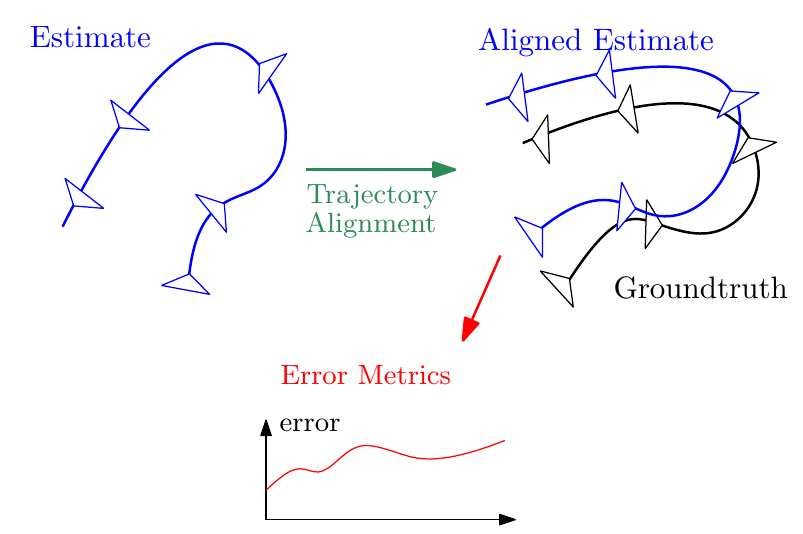
Z. Zhang, D. Scaramuzza A Tutorial on Quantitative Trajectory Evaluation for Visual(-inertial) Odometry IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, 2018. PDF (PDF, 483 KB) PPT (PPTX, 7 MB) VO/VIO Evaluation Toolbox |
 |
Perception-aware Receding Horizon Navigation for MAVs IEEE International Conference on Robotics and Automation (ICRA), 2018. |
 |
R. Gomez-Ojeda, Z. Zhang, J. Gonzalez-Jimenez, D. Scaramuzza Learning-based Image Enhancement for Visual Odometry in Challenging HDR Environments IEEE International Conference on Robotics and Automation (ICRA), 2018. |
 |
Z. Zhang, C. Forster, D. Scaramuzza Active Exposure Control for Robust Visual Odometry in HDR Environments IEEE International Conference on Robotics and Automation (ICRA), 2017. |
 |
Benefit of Large Field-of-View Cameras for Visual Odometry IEEE International Conference on Robotics and Automation (ICRA), Stockholm, 2016. PDF (PDF, 6 MB) PPT (PPTM, 21 MB) YouTube Research page (datasets and software) |

Workshop Papers
|
|
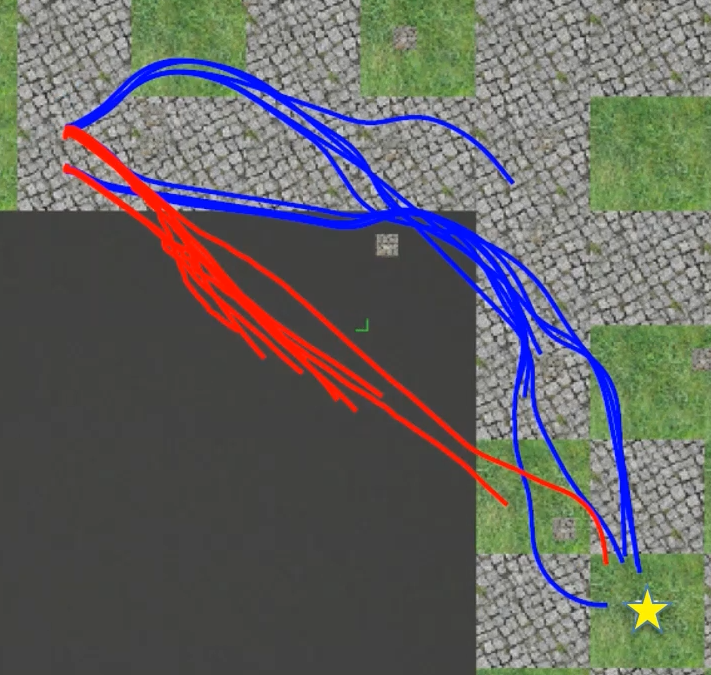
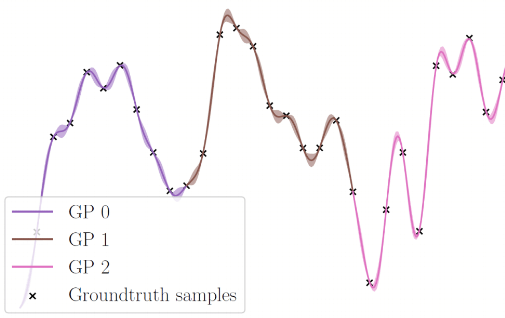
Z. Zhang, D. Scaramuzza Rethinking Trajectory Evaluation for SLAM: a Probabilistic, Continuous-Time Approach ICRA19 Workshop on Dataset Generation and Benchmarking of SLAM Algorithms for VR/AR Best Paper Award! |
Awards
Presentations
- How to Run Reproducible Visual SLAM Experiments (PPTX, 17 MB) in Reproducible Research in Robotics: Current Status and Road Ahead, ICRA 2017